The next generation of gaming is here with the PlayStation 5 and Xbox Series X — except it isn’t, because there are almost no next-generation games to play on them. Demon’s Souls is the first title that can truly be called next-gen, and it shows — even though it’s a remake of a PS3 game… which also shows.
The original Demon’s Souls was an incredibly influential game. Its sequel, Dark Souls, was more popular and improved on the first quite a bit, but much of what made the now major series good had already been established. “Souls-like” is practically a genre now, though the originals are unsurprisingly still the nonpareil.
The comparative few who played Demon’s Souls were elated to hear that it was being remade, and by Bluepoint at that (who also remade the legendary Shadow of the Colossus), but worried that the game might not stand up by modern standards.
Can an old game, the essentials of which are a decade behind its descendants, be given a really, really, really, ridiculously good-looking coat of paint and still act as a blockbuster next-gen debut? Well, it kind of has to — there’s no other option! Fortunately the game really does hold up, and in fact makes for a harrowing, cinematic experience despite a few significant creaks.
I don’t want to give a full review of the game itself; let it suffice to say that, although it looks and runs much better, the core of the game is almost entirely unchanged. Any review from the last decade is still completely relevant, down to the “magic is overpowered” and “inventory burden is annoying.”
As a next-gen gaming experience, however, Demon’s Souls is as yet without comparison. It serves as a showcase not only for the PS5’s graphical prowess, but its sound design, haptics, speed, and OS.

Image Credits: Sony
First, the graphics. It’s clear that Sony and Bluepoint intended this to be a truly lavish remake, and the game’s structure — essentially five long, mostly linear levels — provides an excellent platform for breathtaking visuals carefully tuned to the user’s experience.
The environments themselves are incredibly detailed, and the various enemies you fight very well realized, but what I kept being impressed by was the lighting. Realistic lighting is something that has proven difficult even for top-tier developers, and it’s only now that the hardware has enough headroom to start doing it properly.
Demon’s Souls doesn’t use ray-tracing, the computation-heavy lighting technique perennially on the cusp of being implemented, but the real-time lighting effects are nevertheless dramatic and extremely engaging. This is a dark, dark world and the player is very limited as far as personal light sources, meaning the way you experience the environment is carefully designed.
Although the detailed armor, props, and monsters are all very nice, it’s the realistic lighting that really sets them off in a way that seems truly new and beautiful. Dynamic range is used properly, to have actually dark areas illuminated dramatically, such as the still-terrifying Tower of Latria.
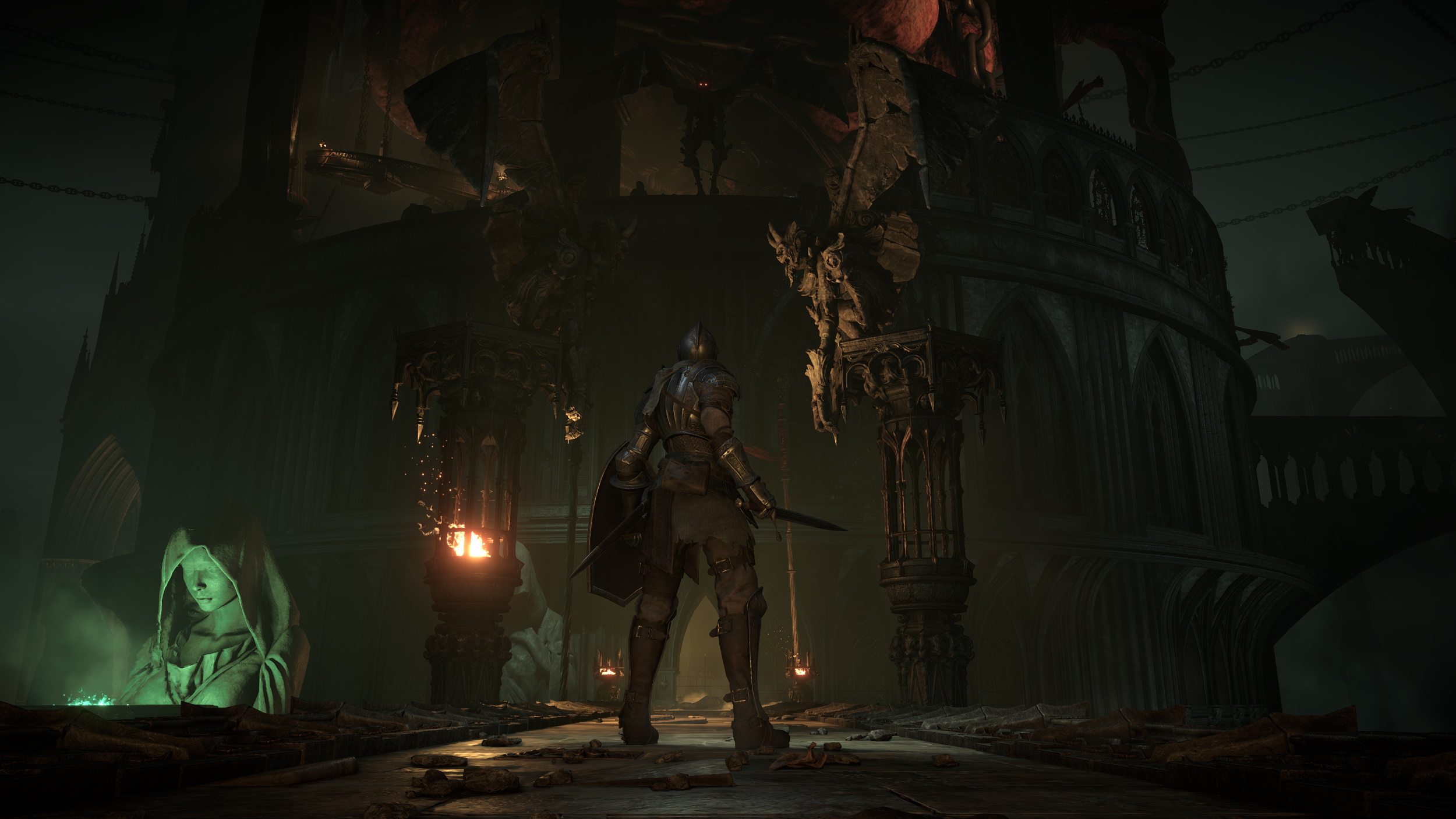
Image Credits: Sony
The game isn’t a huge leap over the best the PC has to offer right now, but it does make me excited for game designers who really want to use light and shadow as gameplay elements.
(Incidentally, don’t bother with the “cinematic” option versus “performance.” The latter keeps the game silky smooth, which for Souls games is a luxury, and the other setting didn’t improve the look much if at all, while severely affecting the framerate. Skip it unless you’re taking glamour shots.)
Similarly sound is extremely well done in the game, though I’m cautious about hyping Sony’s “3D audio” — really, games have had this sort of thing for years on many platforms. Having a decent pair of headphones is the important bit. But perhaps the PS5 offers improved workflows for spatializing sound; at all events in Demon’s Souls it was very good, with great separation, location, and clarity. I have reliably dodged an enemy attack from offscreen after recognizing the characteristic grunt of an attacking foe, and the screeches and roars of dragons and boss monsters (as well as the general milieu of Latria) were suitably chilling.

Image Credits: Sony
This combined well with the improved haptics of the DualSense controller, which seemed to have a different “sensation” for every event. A dragon flying overhead, a demon stomping the ground, a blocked attack, an elevator ride. Mostly these were good and only aided immersion, but some, like the elevators, felt to me more like an annoying buzz than a rumble, like holding a power tool. I hope that developers will be sensible about these things and identify vibration patterns that are irritating. Fortunately the intensity can be adjusted universally in the PS5’s controls.
Likewise the adaptive triggers were nice but not game-changing. It was helpful when using the bow to know when the arrow was ready to release, for instance, but beyond a few things like that it was not used to great advantage.
Something that had a more immediate effect on how I played was the incredibly short load times. The Souls series has always been plagued by long load times when traveling and dying, the latter of which you can expect to do a lot. But now it’s rare that I can count to three before I’m materializing at the bonfire again.
This significantly reduces (but far from eliminates) frustration in this infamously unforgiving game, and actually makes me play it differently. Where once I could not be bothered to briefly travel to another area or the hub in order to accomplish some small task, now I know I can return to the Nexus, fuss around a bit with my loadout, and be back in Boletaria in 30 seconds flat. If I die, I’m back in action in five seconds rather than twenty, and believe me, that adds up real fast. (Load times are improved across the board in PS4 games running on the PS5 as well.)
Aiding this, kind of, is the new fancy pause screen Sony has implemented on its new console. When hitting the (annoyingly PS-shaped) PS button, a set of “cards” appears showing recent achievements and screenshots, but also ongoing missions or game progress. Pausing in Latria to take a breath, the menu offered up the ability to instantly warp to one of the other worlds, losing my souls but skipping the ordinarily requisite Nexus stop. This will certainly change how speedruns are accomplished, and provides a useful, if somewhat immersion-breaking, option for the scatterbrained player.
The pause menu also provides a venue for tips and hints, in both text and video form. Again this is a funny game to debut these in (I don’t count Astro’s Playroom, the included game/tech demo, which is fun but slight), because one of the Souls series’s distinctive features is player-generated notes and ghosts that alternatively warn and deceive new players. In another game I might have relied on the PS5’s hints more, but for this specific title they seem somewhat redundant.
As arguably the only “real” PS5 launch title, Demon’s Souls is a curious but impressive creature. It definitely shows the new console to advantage in some ways, but the game itself (while still amazing) is dated in many ways, limiting the possibilities of what can be shown off in the first place.
Certainly the remake is the best (and for many, only) way to play a classic, and for that alone it is recommended — though the $70 price (more in Europe and elsewhere) is definitely a bit of a squinter. One would hope that for the new higher asking price, we could expect next-generation gameplay as well as next-generation trimmings. Well, for now we have to take what we can get.
from RSSMix.com Mix ID 8176395 https://techcrunch.com/2020/11/13/demons-souls-the-first-truly-next-gen-game-is-a-lopsided-but-impressive-showcase/ via http://www.kindlecompared.com/kindle-comparison/